
CVC has a new PhD on its record!
Jose Luis Gómez Zurita successfully defended his dissertation on Computer Science on March 23, 2023, and he is now Doctor of Philosophy by the Universitat Autònoma de Barcelona.
What is the thesis about?
The curse of data labeling is a costly bottleneck in supervised deep learning, where large amounts of labeled data are needed to train intelligent systems. In onboard perception for autonomous driving, this cost corresponds to the labeling of raw data from sensors such as cameras, LiDARs, RADARs, etc. Therefore, synthetic data with automatically generated ground truth (labels) has aroused as a reliable alternative for training onboard perception models. However, synthetic data commonly suffers from synth-to-real domain shift, i.e., models trained on the synthetic domain do not show their achievable accuracy when performing in the real world. This shift needs to be addressed by techniques falling in the realm of domain adaptation (DA).
The semi-supervised learning (SSL) paradigm can be followed to address DA. In this case, a model is trained using source data with labels (here synthetic) and leverages minimal knowledge from target data (here the real world) to generate pseudo-labels. These pseudo-labels help the training process to reduce the gap between the source and the target domains. In general, we can assume accessing both, pseudo-labels and a few amounts of human-provided labels for the target domain data. However, the most interesting and challenging setting consists in assuming that we do not have human-provided labels at all. This setting is known as unsupervised domain adaptation (UDA). This PhD focuses on applying SSL to the UDA setting, for onboard visual tasks related to autonomous driving.
We start by addressing the synth-to-real UDA problem on onboard vision-based object detection (pedestrians and cars), a critical task for autonomous driving and driving assistance. In particular, we propose to apply an SSL technique known as co-training, which we adapt to work with deep models that process a multi-modal input. The multi-modality consists of the visual appearance of the images (RGB) and their monocular depth estimation. The synthetic data we use as the source domain contains both, object bounding boxes and depth information. This prior knowledge is the starting point for the co-training technique, which iteratively labels unlabeled real-world data and uses such pseudo-labels (here bounding boxes with an assigned object class) to progressively improve the labeling results. Along this process, two models collaborate to automatically label the images, in a way that one model compensates for the errors of the other, so avoiding error drift. While this automatic labeling process is done offline, the resulting pseudo-labels can be used to train object detection models that must perform in real-time onboard a vehicle. We show that multi-modal co-training improves the labeling results compared to single-modal co-training, remaining competitive compared to human labeling.
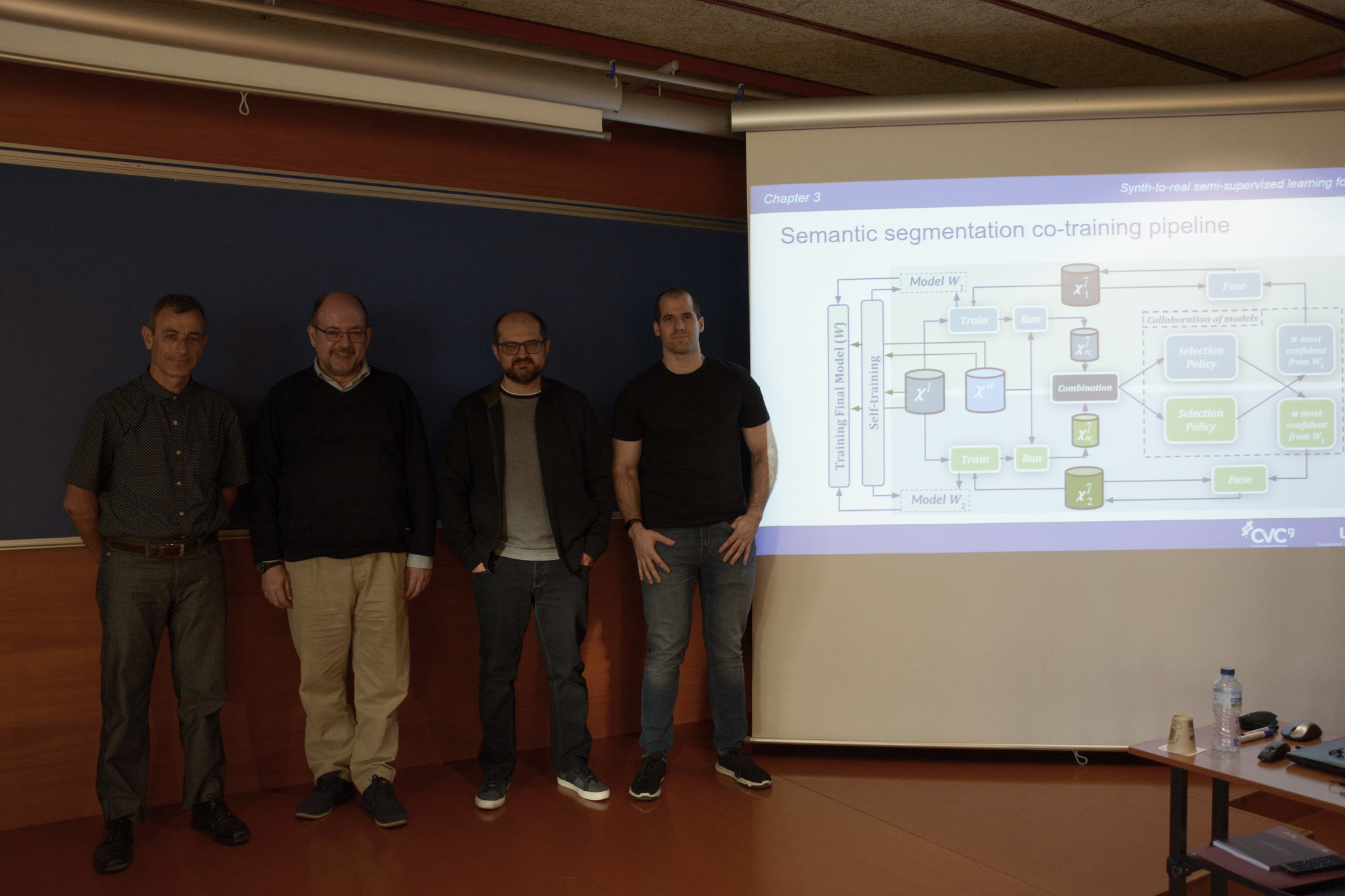
Given the success of co-training in the context of object detection, we have also adapted this technique to a more crucial and challenging visual task, namely, onboard semantic segmentation. In fact, providing labels for a single image can take from 30 to 90 minutes for a human labeler, depending on the content of the image. Thus, developing automatic labeling techniques for this visual task is of great interest to the automotive industry. In particular, the new co-training framework addresses synth-to-real UDA by an initial stage of self-training. Intermediate models arising from this stage are used to start the co-training procedure, for which we have elaborate an accurate collaboration policy between the two models performing the automatic labeling. Moreover, our co-training seamlessly leverages datasets from different synthetic domains. In addition, the co-training procedure is agnostic to the loss function used to train the semantic segmentation models which perform the automatic labeling. We achieve state-of-the-art results on publicly available benchmark datasets, again, remaining competitive compared to human labeling.
Finally, on the ground of our previous experience, we have designed and implemented a new SSL technique for UDA in the context of visual semantic segmentation. In this case, we mimic the labeling methodology followed by human labelers. In particular, rather than labeling full images at a time, categories of semantic classes are defined and only those are labeled in a labeling pass. In fact, different human labelers can become specialists in labeling different categories. Afterward, these per-category-labeled layers are combined to provide fully labeled images. Our technique is inspired by this methodology since we perform synth-toreal UDA per category, using the self-training stage previously developed as part of our co-training framework. The pseudo-labels obtained for each category are finally fused to obtain fully automatically labeled images. In this context, we have also contributed to the development of a new photo-realistic synthetic dataset based on path-tracing rendering. Our new SSL technique seamlessly leverages publicly available synthetic datasets as well as this new one to obtain state-of-the-art results on synth-to-real UDA for semantic segmentation. We show that the new dataset allows us to reach better labeling accuracy than previously existing datasets, at the same time that it complements well them when combined. Moreover, we also show that the new human-inspired SSL technique outperforms co-training.


SHARE ON


